凸包
- 叉积
在平面中我们为了度量一条直线的倾斜状态,为引入倾斜角这个概念。
而通过在直角坐标系中建立 $\tan a=k$,我们实现了将几何关系和代数关系的衔接,这其实也是用计算机解决几何问题的一个核心。
计算机做的是数值运算,因此你需要做的就是把几何关系用代数关系表达出来。
而在空间中,为了表示一个平面相对空间直角坐标系的倾斜程度,我们利用一个垂直该平面的法向量来度量(因为这转化成了描述直线倾斜程度的问题)。
- 求解三角形(平行四边形)面积
判断 某一点在直线左右侧:
若$a\times b>0$ , 则 $a$ 在 $b$ 的顺时针方向。
- 若$a\times b<0$ , 则 $a$ 在 $b$ 的逆时针方向。
若$a\times b=0$ , 则 $a$ 与 $b$ 共线,但可能同向也可能反向。
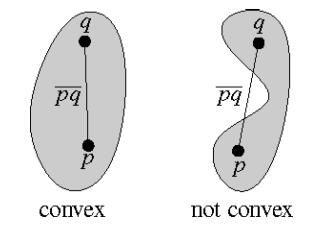
凸包定义为:
平面的一个子集 $S$ 被称为是“凸”的,当且仅当对于任意两点 $p$,$s ∈S$,线段 $ps$ 都完全属于 $S$。(平面凸包定义)
注意判重!
代码
#include<iostream>
#include<cstdlib>
#include<cstring>
#include<cstdlib>
#include<cmath>
#include<algorithm>
#include<queue>
#include<vector>
#include<bitset>
#include<stack>
#include<map>
using namespace std;
long long r_r(){//快读
long long k=0,f=1;
char c=getchar();
while(!isdigit(c)){
if(c=='-')f=-1;
c=getchar();
}
while(isdigit(c)){
k=(k<<1)+(k<<3)+(c^48);
c=getchar();
}
return k*f;
}
const int o_o=1e6+10;
long long n;
struct po{//记录节点信息
double x;
double y;
}p_p[o_o];
long long s_s[o_o],x_s;
bool cmp(po a,po b){//先按 x 从小到大排序,如果 x 相同,按 y 从小到大排序
return a.x==b.x?a.y<b.y:a.x<b.x;
}
po g_x(po a,po b){//平面上两点做差
return (po){(b.x-a.x),(b.y-a.y)};
}
double c_a(po a,po b){//叉积
return a.x*b.y-a.y*b.x;
}
void g_t(){//找凸包
//下凸包
//先读入两点,初始化
s_s[++x_s]=1;
s_s[++x_s]=2;
for(int i=3;i<=n;i++){//尝试每个点
po u=g_x(p_p[s_s[x_s-1]],p_p[s_s[x_s]]);
po v=g_x(p_p[s_s[x_s]],p_p[i]);
while(c_a(u,v)<0.0){//叉积
if(x_s==1)break;//就剩一个点了
x_s--;//将队头放弃
//继续比较叉积
u=g_x(p_p[s_s[x_s-1]],p_p[s_s[x_s]]);
v=g_x(p_p[s_s[x_s]],p_p[i]);
}
s_s[++x_s]=i;//当前点入队
}
//上图包
//先读入两点
s_s[++x_s]=n;
s_s[++x_s]=n-1;
for(int i=n-2;i>=1;i--){//尝试每个点
po u=g_x(p_p[s_s[x_s-1]],p_p[s_s[x_s]]);
po v=g_x(p_p[s_s[x_s]],p_p[i]);
while(c_a(u,v)<0.0){//叉积
x_s--;//将队头放弃
//继续比较叉积
u=g_x(p_p[s_s[x_s-1]],p_p[s_s[x_s]]);
v=g_x(p_p[s_s[x_s]],p_p[i]);
}
s_s[++x_s]=i;//当前点入队
}
}
double g_l(po a,po b){//两个点的距离
return sqrt((a.x-b.x)*(a.x-b.x)+(a.y-b.y)*(a.y-b.y));
}
const int m_a=1e9+10;
double a_s;
long long a_a[o_o],x_a;//判重后数组
map<double,bool>m_p;//判重
int main(){
n=r_r();
for(int i=1;i<=n;i++)//读入所有点的信息
scanf("%lf %lf",&p_p[i].x,&p_p[i].y);
sort(p_p+1,p_p+1+n,cmp);//排序
g_t();//找凸包
for(int i=1;i<=x_s;i++){//判重
if(m_p[1ll*p_p[s_s[i]].x*m_a+p_p[s_s[i]].y])continue;//出现过
a_a[++x_a]=s_s[i];
m_p[p_p[s_s[i]].x*m_a+p_p[s_s[i]].y]=1;//标记
}
a_a[++x_a]=a_a[1];//收尾相接
double a_s=0.0;//初始化结果
for(int i=1;i<x_a;i++)a_s+=g_l(p_p[a_a[i]],p_p[a_a[i+1]]);//计算长度
printf("%.2lf",a_s);//输出结果
return 0;
}旋转卡壳
题目让我们处理的是凸包的直径,其中一种思路是将凸包边上的所有的点处理出来后,暴力枚举这些点每两个点之间的距离,找出最大值。
下面的代码中是第二种找凸包的方式(上面的是一半一半找,下面的是通过排序直接判一遍即可。)
代码(排序处理凸包)
#include<iostream>
#include<cstdlib>
#include<cstring>
#include<cstdlib>
#include<cmath>
#include<algorithm>
#include<queue>
#include<vector>
#include<bitset>
#include<stack>
using namespace std;
long long r_r(){//快读
int f=1,x=0;
char c=getchar();
while(!isdigit(c)){
if(c=='-')f=-1;
c=getchar();
}
while(isdigit(c)){
x=(x<<1)+(x<<3)+(c^48);
c=getchar();
}
return x*f;
}
const int m_a=0x3f3f3f3f;//最大值
const int o_o=1e5+10;
struct po{//维护每个节点
int x;
int y;
}p_p[o_o],s_s[o_o],t_p;
int n,t_t;
int c_a(po a,po b,po c,po d){//叉积
return (b.x-a.x)*(d.y-c.y)-(b.y-a.y)*(d.x-c.x);
}
long long g_l(po a,po b){//两点距离平方
return (a.x-b.x)*(a.x-b.x)+(a.y-b.y)*(a.y-b.y);
}
bool cmp(po a,po b){
int g_s=c_a(p_p[0],a,p_p[0],b);//叉积
if(g_s>0)return 1;//b 在 1 号节点和 a 的顺时针位置,交换位置(将 a 替换掉)
else if(!g_s)return g_l(p_p[0],a)<g_l(p_p[0],b);//在一条线上,距离近的在前
return 0;//不交换位置
}
void b_t(){
//初始化
t_p.x=m_a;
t_p.y=m_a;
int a_i=0;
//记录最右边最上边的点
for(int i=0;i<n;i++)
if(t_p.y>p_p[i].y||t_p.y==p_p[i].y&&t_p.x>p_p[i].x){
t_p=p_p[i];
a_i=i;//记录编号
}
swap(p_p[0],p_p[a_i]);//将当前点变成第一个点
sort(p_p+1,p_p+n,cmp);//所有节点排序(不包括第一个节点)
s_s[0]=p_p[0];//记录第一个点
for(int i=1;i<n;i++){
while(c_a(s_s[t_t-1],s_s[t_t],s_s[t_t],p_p[i])<=0&&t_t)t_t--;
//找凸点
s_s[++t_t]=p_p[i];//记录
}
}
long long g_a(){
long long a_s=0;
s_s[++t_t]=p_p[0];//记录第一个点
for(int i=0;i<t_t;i++)//枚举所有点
for(int j=i+1;j<t_t;j++)//枚举所有点
a_s=max(a_s,g_l(s_s[i],s_s[j]));//查找最大值
return a_s;
}
int main(){
n=r_r();
for(int i=0;i<n;i++)//读取每个节点坐标
p_p[i].x=r_r(),p_p[i].y=r_r();
b_t();//处理凸包
printf("%lld",g_a());//处理结果
return 0;
}代码(一半一半找凸包法)
#include<iostream>
#include<cstdlib>
#include<cstring>
#include<cstdlib>
#include<cmath>
#include<algorithm>
#include<queue>
#include<vector>
#include<bitset>
#include<stack>
#include<map>
using namespace std;
long long r_r(){
long long k=0,f=1;
char c=getchar();
while(!isdigit(c)){
if(c=='-')f=-1;
c=getchar();
}
while(isdigit(c)){
k=(k<<1)+(k<<3)+(c^48);
c=getchar();
}
return k*f;
}
const int o_o=1e6+10;
long long n;
struct po{
long long x;
long long y;
}p_p[o_o];
long long s_s[o_o],x_s;
bool cmp(po a,po b){
return a.x==b.x?a.y<b.y:a.x<b.x;
}
po g_x(po a,po b){
return(po){(b.x-a.x),(b.y-a.y)};
}
long long c_a(po a,po b){
return a.x*b.y-a.y*b.x;
}
void g_t(){
s_s[++x_s]=1;
s_s[++x_s]=2;
for(int i=3;i<=n;i++){
po u=g_x(p_p[s_s[x_s-1]],p_p[s_s[x_s]]);
po v=g_x(p_p[s_s[x_s]],p_p[i]);
while(c_a(u,v)<0.0){
if(x_s==1)break;
x_s--;
u=g_x(p_p[s_s[x_s-1]],p_p[s_s[x_s]]);
v=g_x(p_p[s_s[x_s]],p_p[i]);
}
s_s[++x_s]=i;
}
s_s[++x_s]=n;
s_s[++x_s]=n-1;
for(int i=n-2;i>=1;i--){
po u=g_x(p_p[s_s[x_s-1]],p_p[s_s[x_s]]);
po v=g_x(p_p[s_s[x_s]],p_p[i]);
while(c_a(u,v)<0.0){
x_s--;
u=g_x(p_p[s_s[x_s-1]],p_p[s_s[x_s]]);
v=g_x(p_p[s_s[x_s]],p_p[i]);
}
s_s[++x_s]=i;
}
}
double g_l(po a,po b){
return sqrt((a.x-b.x)*(a.x-b.x)+(a.y-b.y)*(a.y-b.y));
}
long long g_2(po a,po b){
return (a.x-b.x)*(a.x-b.x)+(a.y-b.y)*(a.y-b.y);
}
const int m_a=1e9+10;
long long a_s;
long long a_a[o_o],x_a;
map<long long,bool>m_p;
void f_i(){
s_s[++x_a]=s_s[1];
for(int i=1;i<=x_a;i++)
for(int j=i+1;j<=x_a;j++)a_s=max(a_s,g_2(p_p[a_a[i]],p_p[a_a[j]]));
}
int main(){
n=r_r();
for(int i=1;i<=n;i++)
p_p[i].x=r_r(),p_p[i].y=r_r();
sort(p_p+1,p_p+1+n,cmp);
g_t();
for(int i=1;i<=x_s;i++){//判重
if(m_p[1ll*p_p[s_s[i]].x*m_a+p_p[s_s[i]].y])continue;
a_a[++x_a]=s_s[i];
m_p[1ll*p_p[s_s[i]].x*m_a+p_p[s_s[i]].y]=1;
}
f_i();
printf("%ld",a_s);
return 0;
}
但是,由于调用的 map 来判重,它的内部是一棵树,所以会有不稳定的复杂度,更推荐第一种解法。
凸包模板题也可以用第一种解法,这里不再赘述。
三维凸包
- 加减运算:
三维对应的值加减。
- 模长:
- 点积:
三维对应值相乘的和。
判断位置:
$< 0$ 方向基本(不是完全,还有一维)相反,夹角在 $(90,180)$ 之间 。
$> 0$ 方向基本相同,夹角在 $(0,90)$ 之间 。
$= 0$ 正交(垂直)。
在代码中,我们用四数判断是否为“凸点”时,表达式:
(目前已有 $a,b,c$,新点是 $x$)
和 $0$ 的大小关系。(注意点差乘的区别。)
- 叉积:
- 计算三角形面积(上面有):
- 扰动:
我们用的是三角形计算法,但是难免会出现多点共面,同时题目要求的精度又非常低。
这时我们可以让每个点的位置移动一点点(真的一点点,精度允许范围内!),虽然我们的精度没变,但是几点面的定义确实严格的,不能又丝毫偏差。
这样就可用三角形求面积法了。
代码
#include<iostream>
#include<cstdlib>
#include<cstring>
#include<cstdlib>
#include<cmath>
#include<algorithm>
#include<queue>
#include<vector>
#include<bitset>
#include<stack>
#include<map>
using namespace std;
long long r_r(){//快读
long long k=0,f=1;
char c=getchar();
while(!isdigit(c)){
if(c=='-')f=-1;
c=getchar();
}
while(isdigit(c)){
k=(k<<1)+(k<<3)+(c^48);
c=getchar();
}
return k*f;
}
const long long o_o=2e4+10;
const double m_i=1e-9;//极小值
struct p_1{//记录点
double x,y,z;
void r_d(){//点的坐标
scanf("%lf %lf %lf",&x,&y,&z);
}
p_1 operator +(const p_1&n)const{//加法
return {x+n.x,y+n.y,z+n.z};
}
p_1 operator -(const p_1&n)const{//减法
return {x-n.x,y-n.y,z-n.z};
}
p_1 operator *(const p_1&n)const{//叉乘
return {y*n.z-z*n.y,z*n.x-x*n.z,x*n.y-y*n.x};
}
double operator ^(const p_1&n)const{//点积
double a_s=x*n.x+y*n.y+z*n.z;
return a_s;
}
}p_p[o_o];//存点的基本信息
long long n,m,x_n;
double l_x(p_1 k){//模长
return sqrt(k^k);
}
struct p_2{//记录面
long long x,y,z;//这里不是坐标,是三个点的序号
//或者说,当前面由上面三个点确定的
bool c_a(p_1 a_s){//判断位置
//右手,食指指向第一个向量的方向,中指指向第二个向量的方向,大拇指为结果方向
//用来判断点的位置
//<0 方向基本(不是完全,还有一维)相反,夹角在 90 ~ 180 之间
//>0 方向基本相同,夹角在 0 ~ 90 之间
//=0 正交
return ((a_s-p_p[x])^((p_p[y]-p_p[x])*(p_p[z]-p_p[x])))>0?1:0;
}
};
void g_i(double&x){//随机小数(数要足够小,这样不会影响结果)
x=x+((double)rand()/(double)RAND_MAX-0.5)*m_i*10;
}
void r_d(){//读入
x_n=r_r();//点数
for(int i=1;i<=x_n;i++){
p_1 p;
p.r_d();//读入点的基本信息
bool b_p=0;
for(int j=1;j<=n;j++)
//这个点和另一个点无限接近,那么这个点就不要了(精度可以承受)
if(fabs(p.x-p_p[j].x)<=m_i&&fabs(p.y-p_p[j].y)<=m_i&&fabs(p.z-p_p[j].z)<=m_i){
b_p=1;//标记,不要了
break;
}
if(!b_p)p_p[++n]=p;//读入当前点的信息
}
for(int i=1;i<=n;i++){//扰动
g_i(p_p[i].x);
g_i(p_p[i].y);
g_i(p_p[i].z);
}
}
bool b_b[o_o][o_o];
double g_a(){
vector<p_2>x_x;
//将前三个点先入队
x_x.push_back((p_2){1,2,3});
x_x.push_back((p_2){3,2,1});
for(long long i=4;i<=n;i++){//从第四个点开始处理
vector<p_2>k_k;
for(long long j=0;j<x_x.size();j++){
bool b_p=x_x[j].c_a(p_p[i]);//判断位置
if(!b_p)k_k.push_back(x_x[j]);//是凸点,入队
//标记
b_b[x_x[j].x][x_x[j].y]=b_p;
b_b[x_x[j].y][x_x[j].z]=b_p;
b_b[x_x[j].z][x_x[j].x]=b_p;
}
//没有处理过这两个点的入队(x,y 处理和 y,x 处理是一个意思,所以要判重)
for(long long j=0;j<x_x.size();j++){
//两个点和当前点的入队(三点成面,最后统计面积)
if(b_b[x_x[j].x][x_x[j].y]!=b_b[x_x[j].y][x_x[j].x]&&b_b[x_x[j].x][x_x[j].y])
k_k.push_back((p_2){x_x[j].x,x_x[j].y,i});
if(b_b[x_x[j].y][x_x[j].z]!=b_b[x_x[j].z][x_x[j].y]&&b_b[x_x[j].y][x_x[j].z])
k_k.push_back((p_2){x_x[j].y,x_x[j].z,i});
if(b_b[x_x[j].z][x_x[j].x]!=b_b[x_x[j].x][x_x[j].z]&&b_b[x_x[j].z][x_x[j].x])
k_k.push_back((p_2){x_x[j].z,x_x[j].x,i});
}
x_x=k_k;//更新
}
double a_s=0;
for(long long i=0;i<x_x.size();i++)//统计答案(向量求三角形面积)
a_s+=l_x((p_p[x_x[i].y]-p_p[x_x[i].x])*(p_p[x_x[i].z]-p_p[x_x[i].x]))/2;
return a_s;
}
int main(){
r_d();//读入
printf("%.3lf",g_a());//输出
return 0;
}
半平面交
每次处理图形,将新图形的边和原图形每条边比较,更新找到最大图形(有些时候两边相交要维护交点)。
最后存的是所有图形的外轮廓的节点(也就是覆盖的面积的多边形的所有顶点),最后通过三角形面积法计算面积即可。
代码
#include<iostream>
#include<cstdlib>
#include<cstring>
#include<cstdlib>
#include<cmath>
#include<algorithm>
#include<queue>
#include<vector>
#include<bitset>
#include<stack>
#include<map>
using namespace std;
long long r_r(){//快读
long long k=0,f=1;
char c=getchar();
while(!isdigit(c)){
if(c=='-')f=-1;
c=getchar();
}
while(isdigit(c)){
k=(k<<1)+(k<<3)+(c^48);
c=getchar();
}
return k*f;
}
const int o_o=1e3+10;
struct po{
double x,y;
po operator -(const po n){//减法
return (po){x-n.x,y-n.y};
}
po operator +(const po n){//加法
return (po){x+n.x,y+n.y};
}
po operator *(double t){//乘法(缩放)
return (po){x*t,y*t};
}
double c_a(po n){//叉积
return x*n.y-y*n.x;
}
}a_i[o_o],b_i[o_o],c_i[o_o];
int n,m,x_c,x_p;
void a_d(po a_1,po a_2,po b_1,po b_2){
po k_1=a_2-a_1;
po k_2=b_2-b_1;
po k_3=b_1-a_1;
double t=k_2.c_a(k_3)/k_2.c_a(k_1);//计算斜率
c_i[++x_c]=a_1+k_1*t;//记录交点
}
void f_i(po a,po b){//维护最大覆盖图形
x_c=0;
a_i[x_p+1]=a_i[1];
for(int i=1;i<=x_p;i++)
if((a-a_i[i]).c_a(b-a_i[i])>=0){//在顺时针方向或同向
c_i[++x_c]=a_i[i];//记录节点
if((a-a_i[i+1]).c_a(b-a_i[i+1])<0)//逆时针方向
a_d(a_i[i],a_i[i+1],a,b);//记录交点
}else if((a-a_i[i+1]).c_a(b-a_i[i+1])>=0)//在下一个点的顺时针方向
a_d(a_i[i],a_i[i+1],a,b);//记录交点
for(int i=1;i<=x_c;i++)a_i[i]=c_i[i];//更新节点
x_p=x_c;//更新节点数
}
double c_s(){
//所有剩下的点,根据三角形求面积
double a_s=0;
for(int i=2;i<x_p;i++)a_s+=(a_i[i]-a_i[1]).c_a(a_i[i+1]-a_i[1]);
return a_s/2;
}
int main(){
n=r_r(),m=r_r();
x_p=m;//记录图形的节点数量
n--;//单独处理第一个图形
for(int i=1;i<=m;i++){//记录当前图形所有的点
a_i[i].x=r_r();
a_i[i].y=r_r();
}
while(n--){//处理剩下的图形
m=r_r();//图形点的数量
//读入节点
b_i[1].x=r_r();
b_i[1].y=r_r();
b_i[m+1]=b_i[1];
for(int i=2;i<=m;i++){
b_i[i].x=r_r();
b_i[i].y=r_r();
}
//处理新图形所有相邻节点
for(int i=1;i<=m;i++)f_i(b_i[i],b_i[i+1]);
}
printf("%.3f\n",c_s());//统计结果
return 0;
}代码(极角排序)
- 极角排序
(如果不能自动跳,点击文章目录的“函数作图”标签,往下略翻,即可看到。)
不难发现,它是单调的,可以用来排序。
同样可以使用叉积来实现极角排序。
这里我们同 $\arctan$ 函数来处理。
- 边处理
不难发现,凸多边形和凸多边形交的“特出地方”会出现“凹陷”的地方,我们就是将所有“凹陷”里的交点,统计出来。
同时用双端队列,将没有交点的边(“无关人士”)“弹”走,交点仍然要通过斜率计算(和上面一样),记录点。
最后,计算面积的时候仍然用三角形面积法。
#include<iostream>
#include<cstdlib>
#include<cstring>
#include<cstdlib>
#include<cmath>
#include<algorithm>
#include<queue>
#include<vector>
#include<bitset>
#include<stack>
#include<map>
using namespace std;
long long r_r(){//快读
long long k=0,f=1;
char c=getchar();
while(!isdigit(c)){
if(c=='-')f=-1;
c=getchar();
}
while(isdigit(c)){
k=(k<<1)+(k<<3)+(c^48);
c=getchar();
}
return k*f;
}
const int o_o=1e3+10;
const double m_i=1e-10;
int n,m,s_m;
struct po{
double x,y;
po operator+(const po&a)const{//加法
return {x+a.x,y+a.y};
}
po operator-(const po&a)const{//减法
return {x-a.x,y-a.y};
}
po operator*(const double&a)const{//乘法
return {x*a,y*a};
}
po operator/(const double&a)const{//除法
return {x/a,y/a};
}
}p_p[1100],x_x[1100];
double c_1(po x,po y){//叉积
return x.x*y.y-x.y*y.x;
}
struct b_n{
po x,y;//两个端点
double k;//方便极角排序
b_n g_k(po a,po b){
x=a;
y=b;
k=atan2(y.y,y.x);
}
bool operator<(const b_n&a)const{//排序方式
return k<a.k;
}
}k_k[1100],s_s[1100];
int h_i,t_i;
po g_t(b_n x,b_n y){//处理交点
po k_k=x.x-y.x;
double t=c_1(y.y,k_k)/c_1(x.y,y.y);
return x.x+x.y*t;
}
void f_i(){
//初始化
h_i=t_i=1;
s_s[h_i]=k_k[1];
for(int i=2;i<=s_m;i++){
//交点在逆时针方向
while(h_i<t_i&&c_1(k_k[i].y,x_x[t_i-1]-k_k[i].x)<=m_i)--t_i;
while(h_i<t_i&&c_1(k_k[i].y,x_x[h_i]-k_k[i].x)<=m_i)++h_i;
s_s[++t_i]=k_k[i];//加上当前的边
if(fabs(c_1(s_s[t_i].y,s_s[t_i-1].y))<=m_i){//平行
t_i--;
//记录平行中左边的
if(c_1(s_s[t_i].y,k_k[i].x-s_s[t_i].x)>m_i)s_s[t_i]=k_k[i];
}
if(h_i<t_i)x_x[t_i-1]=g_t(s_s[t_i-1],s_s[t_i]);//加入交点
}
while(h_i<t_i&&c_1(s_s[h_i].y,x_x[t_i-1]-s_s[h_i].x)<=m_i)--t_i;
if(t_i-h_i<=1)return;//没边了
x_x[t_i]=g_t(s_s[h_i],s_s[t_i]);//记录
}
void g_a(){//三角形面积法
double a_s=0;
for(int i=h_i;i<=t_i;i++){
int k=i+1;
if(i==t_i)k=h_i;
a_s+=c_1(x_x[i],x_x[k]);
}
printf("%.3lf",a_s/2);
}
int main(){
int n=r_r();
for(int i=1;i<=n;i++){
m=r_r();
for(int j=1;j<=m;j++)scanf("%lf%lf",&p_p[j].x,&p_p[j].y);//存点
for(int j=1;j<=m;j++){//加边
++s_m;
int k=j+1;
if(j==m)k=1;
k_k[s_m].g_k(p_p[j],p_p[k]-p_p[j]);
}
}
sort(k_k+1,k_k+s_m+1);//极角排序
f_i();//处理边
g_a();//统计结果
return 0;
}
